I have a customer who just started surveying with LiDAR on a DJI Matrice M400 drone. They had a couple of great questions, and while looking for answers I realized there wasn’t a solid explanation online. Since I did do quite a bit of reading to find an answer, I figured I would write up what I found and give you some useful takeaways for your future flights. Specifically, we want to answer the following questions around how rain affects LiDAR data and mapping:
Can You Perform a LiDAR Mapping Survey in the Rain?
How Does Rain Affect LiDAR Quality?
Should Any Considerations Be Made While Processing the Data?
What are the Recommended Practices for Surveying in the Rain?
I’ll put the articles I refer to at the bottom of this article if you want to do more in depth. In order to answer these questions, we first have to understand the principles of how LiDAR works.
What is LiDAR and How Does it Work?
How Does Rain Affect LiDAR Quality?
What Changes in Your Data?
Do Manufacturers Recommend Mapping in the Rain?
Planning Around a Rain-Day
Processing Rainy LiDAR Data Without Losing Your Mind
What Accuracy Hit Should You Expect?
Common Questions I Get (and My Straight Answers)
A Practical Rain Playbook You Can Copy
Final Thoughts
Citations
In short, LiDAR—Light Detection and Ranging—sends out short pulses of laser light and measures how long they take to bounce back, which is known as the Time of Flight (TOF) of the laser. With a known TOF, we can deduce the distance to the target using the following equation:
R = ½ * c * t
Where R is the distance between the target and sensor, c is the speed of light in air and t is the TOF of the laser between emission and reception.1 This equation is the basic principle that LiDAR relies on, The math does get significantly more complicated and to get a better idea of the real math behind LiDAR I really do suggest reading the chapter I linked below from Introduction to LiDAR Remote Sensing (2024).
In clear, dry air, the outbound pulse travels to the ground, reflects off surfaces, and returns with minimal interference. There are many other factors that influence the performance and functionality of a drone LiDAR system, but if we can understand the principal equation of LiDAR, we can understand how rain will affect our data. Next, to understand whether we can actually map with LiDAR sensors in the rain, we have to understand the effect of rain on our measurements.

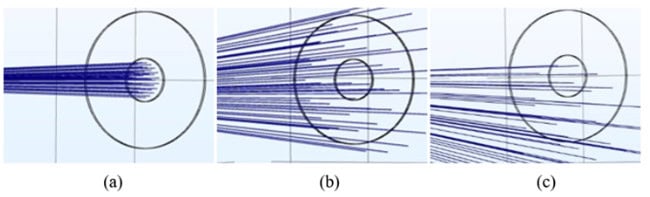
As we laid out above, the measurement of distance with a laser pulse is dependent on the assumption that we are measuring the speed of light in air and there are no obstacles between the sensor and the ground. When we introduce rain drops, this assumption is no longer accurate. When light hits water it is refracted and has its path altered.2 Depending on the intensity of the rain, this could introduce a massive source of uncontrollable error to our results. There are multiple other effects we must also consider.
Raindrops absorb and scatter laser energy. Translation: heavier rain shortens your effective range and reduces the signal-to-noise ratio (SNR). Put more bluntly: rain “eats” your LiDAR signal, and the amount it eats depends on how hard it’s raining.
Raindrops refract and sometimes reflect portions of the beam. What comes back to the receiver can be misdirected or distorted, producing noisy “speckle” points suspended in air, or unusually wide/weak returns from targets behind the rain. The drop’s shape, size distribution, and even the presence of pollutants (which change optical properties) all matter. That makes the net effect extremely, difficult if not impossible to model, and highly variable based on environmental conditions.3
Some pulses will hit raindrops directly and backscatter toward the sensor. These false returns appear as ghost points floating between the sensor and the ground. In light drizzle, they might be sparse; in a deluge, they can form sheet-like noise layers.
Unlike fog particles (mostly small, slow), raindrops are moving scatterers; the pulse meets a different constellation of droplets on the way out and the way back. That randomness injects non-repeatable noise—two passes over the same line can produce different speckle patterns and intensity statistics.
The net effect is exactly what you’d expect from physics and field experience: you can get results in the rain, but they’ll be noisier than a dry-day flight. Based on my research, there doesn’t seem to be much literature on how rain affects mapping results.
That being said, as LiDAR is being seriously considered a backbone of autonomous vehicle sensor suites, there is some literature around the impact of rain on sensor returns. As you would expect, as rain droplet size and the intensity increases, we see a pretty significant drop-off in the performance of LiDAR sensors. With a 2024 study finding an up to a 30% blockage at a 30 µL droplet and a 2017 70% decrease in laser intensity measurements at a 7 l/m^2*h rainfall.4,5 Both articles are great reads if you want to better understand the optical effect of rain on LiDAR sensors.
This raises the question, do manufacturers recommend mapping in the rain?
Now a modern mapping LiDAR system typically includes the following:
The reason I bring this up is that all of these units are sensitive to water intrusion. Most manufacturers offer some sort of IP rating, for instance DJI’s has an IP54 rating, which is rated for limited dust ingress and water spray. This is not ideal for sustained rain, in practice, I recommend treating an IP54 rating as a get-home safety net, not a let’s fly in the rain rating.
Now manufacturers are quite light on guidance when it comes to using LiDAR in the rain. YellowScan simply says it isn’t recommended (Is LiDAR compatible with rainy or foggy weather?) and DJI simply says performance could be affected.
As we’ve laid out, flying in the rain will affect your data. But if schedule or safety dictates you must, here’s a practical playbook—mixing first principles with the manufacturer notes you shared.
Wet-day point clouds aren’t doomed. A few disciplined steps will rescue a lot of value:
There isn’t a universal rule of thumb—rain is too variable. Light drizzle may cost you only a modest increase in vertical scatter and a small density drop. Moderate to heavy rain can:
Because droplet size, intensity, and pollution load differ by storm (and minute), modeling the exact impact is hard, and lab results with stationary LiDAR don’t map perfectly onto a moving airborne platform. The most actionable mindset: plan for degradation, check against control points, report it with confidence intervals.
Only if schedule or safety leaves no alternative. Your accuracy will be degraded and most LiDAR sensors are not built to stand up to a sustained heavy rainfall.
Not exactly. Fog has smaller droplets and often creates uniform backscatter layers. The advice is similar—expect air points, consider strongest single return—but the noise often looks sheet-like rather than speckly.
You can try, but rain steals photons, so deeper returns will be underrepresented and noisier. For ground models, strongest single return frequently yields cleaner surfaces in wet conditions.
Here’s the condensed checklist I keep handy when the forecast turns grim:
LiDAR is a marvel—timing photons to sketch the world with millimetric finesse. But it’s also a conversation with the atmosphere, and on rainy days the atmosphere talks back. Some of those replies come as lost photons, some as phantom points suspended in midair, and some as subtle shifts in intensity that will never quite sum to “dry-day normal.”
The practical bottom line is simple and honest: yes, you can fly in the rain; no, you won’t love the data. Use the strongest single return when wet air intrudes. Triage your most important work to the front of the mission. Expect noise; design overlap and processing to tame it. And when the choice is yours, wait for a dry window—your point cloud (and your future self) will thank you.
(1) Wang, C.; Yang, X.; Xi, X.; Nie, S.; Dong, P. LiDAR Remote Sensing Principles. In Introduction to LiDAR Remote Sensing; CRC Press, 2024; pp 25–55. https://doi.org/10.1201/9781032671512-2.
(2) Brody, J.; Griffin, L.; Segre, P. Measurements of the Speed of Light in Water Using Foucault’s Technique. Am J Phys2010, 78 (6), 650–653. https://doi.org/10.1119/1.3373942.
(3) Mikhailov, E. F.; Vlasenko, S. S.; Podgorny, I. A.; Ramanathan, V.; Corrigan, C. E. Optical Properties of Soot-Water Drop Agglomerates: An Experimental Study. Journal of Geophysical Research Atmospheres 2006, 111 (7). https://doi.org/10.1029/2005JD006389.
(4) Pao, W. Y.; Howorth, J.; Li, L.; Agelin-Chaab, M.; Roy, L.; Knutzen, J.; Baltazar-y-Jimenez, A.; Muenker, K. Investigation of Automotive LiDAR Vision in Rain from Material and Optical Perspectives. Sensors 2024, 24 (10). https://doi.org/10.3390/s24102997.
(5) Filgueira, A.; González-Jorge, H.; Lagüela, S.; Díaz-Vilariño, L.; Arias, P. Quantifying the Influence of Rain in LiDAR Performance. Measurement (Lond) 2017, 95, 143–148. https://doi.org/10.1016/j.measurement.2016.10.009.
