
Real-Time Kinematic (RTK) GPS surveying is a highly accurate positioning method used in a hole variety of different applications, including construction, agriculture, and surveying. However, even experienced users can encounter issues with their equipment. Fortunately, the vast majority of problems are one of these three common issues; autonomous or DGPS solutions, “Initialize IMU” errors, and elevation discrepancies, all of which are relatively easy to fix. By better understanding your equipment and the root causes you can fix these issues in the minimizing downtime. Check out our video below on the topic.
Autonomous or DGPS Solutions: Why They Happens and How to Fix It
“Initialize IMU”: Resolving Tilt Sensor Calibration Errors
Elevation Discrepancies: What is the Difference Between a Geoid and an Ellipsoid?
What is an Autonomous or DGPS Solution?
One of the most frequent problems in RTK GPS surveying is encountering an autonomous or DGPS (Differential GPS)solution instead of an RTK-fixed solution. What an Autonomous solution indicates is that the receiver is acting as a standalone receiver and receiving no corrections from your base. In this mode, you can expect anywhere from 0.5 – 1 m in accuracy, nowhere near the expected 8 mm horizontal accuracy. Similarly, a DGPS solution indicates that receiver may be receiving some intermittent corrections from the base or is able to receive corrections from SBAS satellites in orbit. In this status, you can also expect around 0.5 m of error in your solution.
What Does an Autonomous or DGPS Solution Look Like?
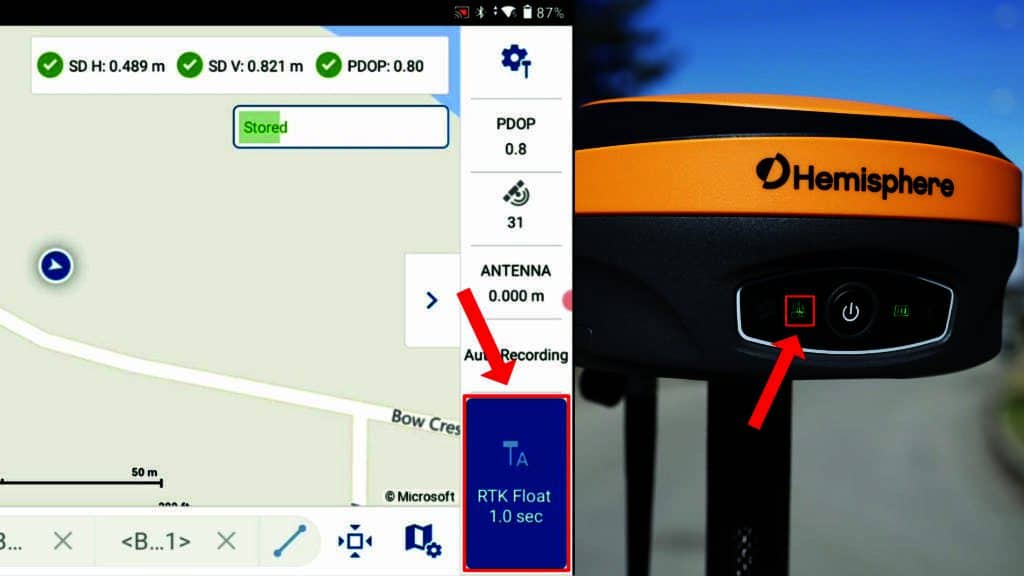
Depending on the software you are using, this issue may present itself differently. In software, such as FieldGenius, this appears as “Aton” or “DGPS” in the store point. Additionally, the radio light on your receiver will not be flashing, indicating that the receiver is not able to hear any information from the base.
Common Causes
How To Troubleshoot
1. Verify Antenna Connections
The easiest fix for this problem is to ensure that the UHF antennas are securely screwed onto the receiver and not damaged. Without a properly attached antenna, the radio signals from the base station cannot reach the rover. There should be not visible bends or breaks in the antenna and it should not be able to move on the threads of the antenna connector.
2. Validate Radio Settings
Go into the instrument settings of your RTK software and review the radio configuration:
Once these settings are synchronized, the radio light on the rover should begin to flash, and the status in Field Genius will change from “Aton” or “DGPS” to “RTK Fixed” or “RTK FLOAT”. Check out the video below video guide for this problem in FieldGenius.
What Does Initialize IMU Mean?
Another common error message is “Initialize IMU,” which appears when the tilt sensor in your receiver is out of calibration. The tilt sensor, or Inertial Measurement Unit (IMU), enables tilt correction for measuring points with the pole at an angle. When it’s uncalibrated, the system cannot provide accurate tilt measurements. Check out the below video to get an idea of how the calibration method can affect the accuracy of your solution and why it is important to get it right.
How Do You Tell When Your Tilt Sensor is Out of Calibration?
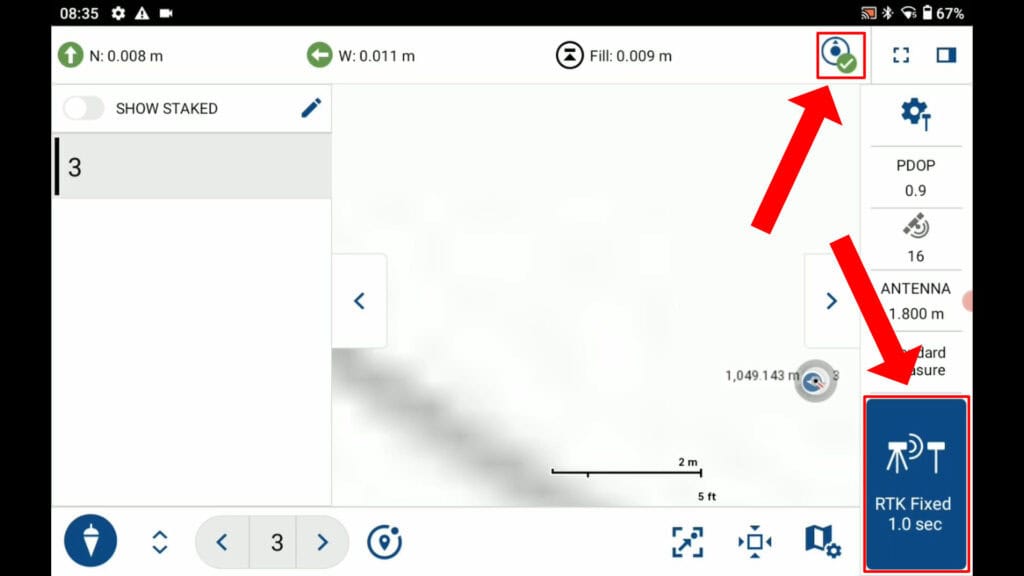
It can be a little more difficult to tell if your tilt sensor is out of calibration when looking at your receiver. The easiest way to tell is to look at your software. Again, in software like FieldGenius, the warning will appear in the point store button. However, it will also appear in the top right corner of the map screen.
How To Troubleshoot
1. Perform a Simple Calibration
Calibrating the IMU is straightforward and takes about 30 seconds:
Once calibrated, the “Initialize IMU” message should disappear, and you can resume surveying with tilt correction enabled.
2. Disable Tilt Correction Temporarily
Although tilt does make you faster (check out this article: The Advantages of Utilizing Tilt in Surveying with RTK Receivers), there are certain scenarios where it is actually better to disable the sensor. If calibration fails repeatedly or environmental factors make it difficult to maintain a fix (e.g., magnetic interference or rugged terrain), or you are attempting to store a control point you can disable the tilt correction:
1. Open the instrument settings.
2. Locate the “Tilt Correction” option and select “Disable.”
3. Confirm and exit.
Disabling the tilt correction allows you to continue surveying like a conventional RTK GPS receiver without IMU assistance. To re-enable tilt correction later, simply return to the settings and select “Enable.”
What is a Geoid and What Difference Does It Make?
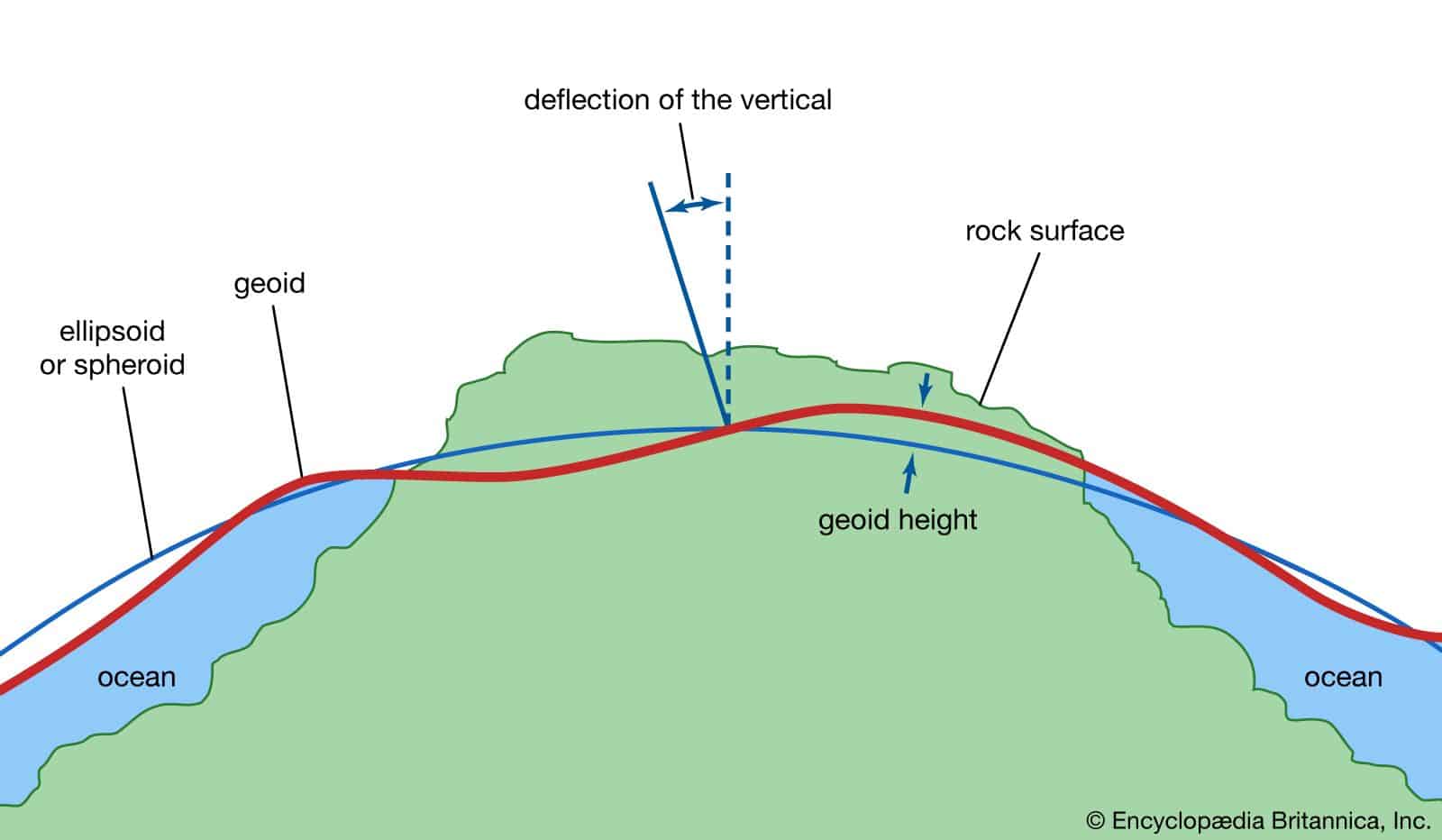
A significant and unexpected difference in elevation—sometimes referred to as an elevation “bust”—is another frequent challenge. Users may report discrepancies of 60 feet or 20 meters between expected and recorded elevations. This occurs because GPS measures elevation relative to an ellipsoid, while most surveys require elevation relative to a geoid (a model that approximates sea level). For a more detailed breakdown, check out our RTK terminology article: RTK Surveying Terms.
What Does a Geoid File Do?
The earth is not a perfect ellipsoid; its shape is influenced by gravitational variations due to water bodies, terrain density, and other factors. These distortions create differences between ellipsoidal and geoidal heights. To correct this, surveyors use geoid files, which model the Earth’s gravitational field and allow GPS systems to provide accurate elevation data.
How To Troubleshoot
1. Set the Correct Vertical System
Apply the settings and save.
In your RTK software, go to the project settings.
Select the vertical coordinate system options. If it is set to “Ellipsoid,” change it to a geoid-based model, such as CGG2013 or Geoid18, or whatever is best used for your area.
2. Download and Install Geoid Files
If the appropriate geoid file is not available in your software, you can download it:
Download files corresponding to your survey area and upload them to your data collector. Check the proper location for the geoid file to be saved.
Visit resources like the National Oceanic and Atmospheric Administration (NOAA) for US-based geoid files or MicroSurvey’s World Geoid Catalog for Canadian and other regions.
3. Reprocess Survey Data
If you have already conducted a survey using the wrong coordinate system, you can reprocess the data. In FieldGenius Android:
1. Open the project in your RTK software.
2. Change the vertical system from “Ellipsoid” to the appropriate geoid model.
3. The software will automatically adjust the recorded data to match the new geoid system.
This correction ensures that your elevation data aligns with known survey benchmarks and provides accurate results.
RTK GPS systems are powerful tools for achieving centimeter-level accuracy, but they require proper configuration and maintenance. By addressing common issues such as autonomous or DGPS solutions, IMU calibration errors, and elevation discrepancies, you can ensure consistent performance in the field. Remember to keep your equipment updated, verify your settings, and leverage available resources to troubleshoot effectively.
With this guide in hand, you’re equipped to tackle the most common RTK GPS issues and keep your projects on track. We also have Survey-Assistant.com where you can find all of the videos linked in this article, as well as downloadable pdfs, and written how to guides. We also have a common problems section with these exact issues: Survey-Assistant Quick Fixes.
An Autonomous solution indicates that the GPS receiver is operating as a standalone device, with no corrections from the base station, resulting in accuracy between 0.5 and 1 meter. A DGPS (Differential GPS) solution means the receiver is receiving partial corrections, such as from SBAS satellites, achieving accuracy around 0.5 meters. Neither solution provides the centimeter-level accuracy expected from an RTK Fixed solution.
You can identify this issue by checking the receiver’s software status. In applications like FieldGenius, terms like “Aton” or “DGPS” will appear, signaling the absence of corrections. Additionally, the radio light on the receiver will remain solid instead of flashing, indicating that it is not receiving data from the base station.
The “Initialize IMU” error indicates that the tilt sensor, also known as the Inertial Measurement Unit (IMU), is out of calibration. This sensor is crucial for tilt correction, which allows accurate measurements when the pole is not perfectly vertical. Without calibration, the system cannot provide reliable tilt-based measurements. Following the 30s calibration routine will resolve this issue.
Elevation discrepancies occur because GPS measures height relative to an ellipsoid model, which does not account for the Earth’s true shape influenced by gravitational variations. To correct this, a geoid file is used. A geoid model approximates mean sea level, providing more accurate elevation data for surveys where vertical measurements are critical.
If the base and rover are not properly communicating, the rover cannot receive the corrections necessary for centimeter-level accuracy. This can happen due to mismatched communication settings (e.g., protocol or frequency), a damaged or improperly attached antenna, or the rover being out of the base’s signal range. Ensuring proper configuration and setup is key to maintaining a reliable RTK Fixed solution.
Bench Mark Equipment & Supplies is your team to trust with all your surveying equipment. We have been providing high-quality surveying equipment to land surveyors, engineers, construction, airborne and resource professionals since 2002. This helps establish ourselves as the go-to team in Calgary, Canada, and the USA. Plus, we provide a wide selection of equipment, including global navigation satellite systems, RTK GPS equipment, GNSS receivers, and more. We strive to provide the highest level of customer care and service for everyone. To speak to one of our team today, call us at 403-286-0333 or email us at [email protected].
